SPI, I2C, UART, I2S, GPIO, SDIO, CAN, només heu de llegir aquest article
L’autobús sempre s’hi queda atrapat. Els senyals d’aquest món són iguals, però hi ha milers d’autobusos, cosa que suposa un mal de cap. En termes generals, hi ha tres tipus d’autobusos: bus intern, bus del sistema i bus extern. El bus intern és el bus entre els xips perifèrics del microordinador i el processador, que s’utilitza per a la interconnexió a nivell de xip; mentre que el bus del sistema és el bus entre les plaques endollables i la placa del sistema del microordinador, i s’utilitza per a l’intercanvi mutu a nivell de la placa endollable. El bus extern és el bus entre el microordinador i el dispositiu extern. Com a dispositiu, el microordinador intercanvia informació i dades amb altres dispositius a través del bus. S'utilitza per a la interconnexió a nivell de dispositiu.
A més del bus, també hi ha algunes interfícies, que són una col·lecció de diversos autobusos, o no es rebutgen.
1. SPI
SPI (Serial Peripheral Interface): el mètode de bus sèrie síncron proposat per MOTOROLA. Port sèrie síncron d’alta velocitat. Es pot sincronitzar la interfície de 3 a 4 fils, enviament i recepció independents.
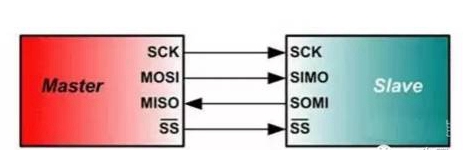
S'utilitza àmpliament a causa de les seves potents funcions de maquinari. A l’instrument intel·ligent i al sistema de mesura i control compost per microordinador d’un sol xip. Si el requisit de velocitat no és elevat, el mode de bus SPI és una bona opció. Pot estalviar ports d'E / S, millorar el nombre de perifèrics i el rendiment del sistema. El bus SPI estàndard consta de quatre línies: línia de rellotge sèrie (SCK), entrada principal / línia de sortida esclava (MISO). Línia de sortida principal / entrada d’esclau (MOSI) i senyal de selecció de xip (CS). Alguns xips d’interfície SPI tenen línies de senyal d’interrupció o no tenen MOSI.
El bus SPI consta de tres línies de senyal: rellotge sèrie (SCLK), sortida de dades sèrie (SDO) i entrada de dades sèrie (SDI). El bus SPI pot realitzar la interconnexió de múltiples dispositius SPI. El dispositiu SPI que proporciona el rellotge de sèrie SPI és un dispositiu SPI master o master (Master) i altres dispositius són esclaus SPI o dispositius esclaus (Slave). La comunicació full-duplex es pot realitzar entre dispositius mestre i esclau. Quan hi ha diversos dispositius esclaus, es pot afegir una línia de selecció de dispositius esclaus. Si utilitzeu un port IO universal per simular el bus SPI, heu de tenir un port de sortida (SDO), un port d’entrada (SDI) i l’altre port depèn del tipus de dispositiu implementat. Si voleu implementar un dispositiu mestre-esclau, necessiteu un port d'entrada i sortida. , Si només es realitza el dispositiu mestre, el port de sortida és suficient; si només es realitza el dispositiu esclau, només es necessita el port d'entrada.
2. I2C
I2C (Circuit inter-integrat): bus sèrie de dos fils desenvolupat per PHILIPS, que s’utilitza per connectar microcontroladors i els seus dispositius perifèrics.
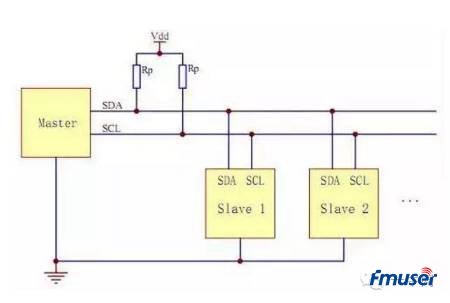
El bus I2C utilitza dos cables (SDA i SCL) per transferir informació entre el bus i el dispositiu, la comunicació en sèrie entre el microcontrolador i els dispositius externs o la transferència de dades bidireccional entre el dispositiu mestre i el dispositiu esclau. I2C és una sortida OD, la majoria d'I2C són de 2 fils (rellotge i dades), generalment s'utilitzen per transmetre senyals de control.
I2C és un bus multi-master, de manera que qualsevol dispositiu pot funcionar com un master i controlar el bus. Cada dispositiu del bus té una adreça única i, segons les seves pròpies capacitats, pot funcionar com a transmissors o receptors. Diversos microcontroladors poden coexistir al mateix bus I2C.
3. UART
UART: port sèrie asíncron universal, comunicació bidireccional completa segons la velocitat de transmissió estàndard, velocitat lenta.
El bus UART és un port sèrie asíncron, de manera que en general és molt més complicat que els dos primers ports sèrie síncrons. En general, consisteix en un generador de velocitat en bauds (la velocitat en bauds generada és igual a 16 vegades la velocitat en transmissió), receptor UART i transmissor UART. Consta de dos cables en maquinari, un per enviar i un per rebre.
UART és un xip utilitzat per controlar ordinadors i dispositius en sèrie. Una cosa a tenir en compte és que proporciona una interfície de dispositiu de terminal de dades RS-232C perquè l'ordinador pugui comunicar-se amb mòdems o altres dispositius de sèrie que utilitzen la interfície RS-232C. Com a part de la interfície, UART també proporciona les funcions següents:
Les dades paral·leles transmeses des de l’ordinador es converteixen en el flux de dades serials de sortida. Convertiu les dades serials de fora de l’ordinador en bytes per al seu ús per dispositius que utilitzen dades paral·leles a l’interior de l’ordinador. Afegiu un bit de paritat al flux de dades sèrie de sortida i realitzeu una comprovació de paritat al flux de dades rebut des de l'exterior. Afegiu la marca d'inici i parada al flux de dades de sortida i suprimiu la marca d'inici i parada del flux de dades rebut. Gestioneu el senyal d’interrupció que envia el teclat o el ratolí (el teclat i el ratolí també són dispositius de sèrie). Pot gestionar el problema de gestió de sincronització de l'ordinador i del dispositiu sèrie extern. Alguns UART de gamma alta també proporcionen memòries intermèdies per a dades d’entrada i sortida. El nou UART és 16550, que pot emmagatzemar 16 bytes de dades a la memòria intermèdia abans que l’ordinador necessiti processar-les. El UART habitual és el 8250. Ara, si compreu un mòdem integrat, normalment hi haurà un UART 16550 dins del mòdem.
3. Comparació de SPI, I2C i UART
Tant els mètodes de comunicació SPI com I2C són comunicacions a curta distància entre el xip i el xip o entre altres components com el sensor i el xip. SPI i IIC són comunicacions de placa a placa, IIC de vegades també fa comunicacions de placa a placa, però la distància és molt curta, però supera el metre, per exemple, algunes pantalles tàctils, pantalles LCD de telèfons mòbils, moltes pel·lícules primes els cables utilitzen IIC, I2C es pot utilitzar per substituir Bus paral·lel estàndard, diversos circuits integrats i mòduls funcionals que es poden connectar. I2C és un bus multi-master, de manera que qualsevol dispositiu pot funcionar com un master i controlar el bus. Cada dispositiu del bus té una adreça única i, segons les seves pròpies capacitats, pot funcionar com a transmissors o receptors. Diversos microcontroladors poden coexistir al mateix bus I2C. Aquestes dues línies pertanyen a transmissions de baixa velocitat.
La UART s'utilitza en la comunicació entre dos dispositius, com ara la comunicació entre un dispositiu i un ordinador feta amb un microordinador d'un sol xip. Aquesta comunicació es pot fer a distàncies llargues. La velocitat UART és més ràpida que les dues anteriors, fins a aproximadament 100K. S'utilitza per comunicar-se amb l'ordinador i el dispositiu o entre l'ordinador i el càlcul, però l'abast efectiu no serà molt llarg, uns 10 metres. L’avantatge de l’UART és que té una àmplia gamma de suport i una estructura de disseny de programes. Simplement, amb el desenvolupament d’USB, UART va baixant progressivament.
5. I2S
I2S (Inter-IC Sound Bus) és un estàndard de bus desenvolupat per Philips per a la transmissió de dades d'àudio entre dispositius d'àudio digitals. La majoria té 3 fils (a més del rellotge i les dades, també hi ha un senyal de selecció de canals esquerre i dret), I2S s’utilitza principalment per transmetre senyals d’àudio. Com ara STB, DVD, MP3, etc. que s’utilitzen habitualment.

A l'estàndard I2S, s'especifiquen tant l'especificació de la interfície de maquinari com el format de les dades d'àudio digital. I2S té 3 senyals principals: 1) Rellotge sèrie SCLK, també anomenat rellotge de bits (BCLK), és a dir, corresponent a cada bit de dades d’àudio digital, SCLK té 1 pols. La freqüència de SCLK = 2 × freqüència de mostreig × nombre de bits de mostreig. 2) El rellotge de trames LRCK, (també anomenat WS), s'utilitza per canviar les dades dels canals esquerre i dret. LRCK de "1" significa que s'estan transmetent les dades del canal esquerre i "0" que es transmeten les dades del canal dret. La freqüència de LRCK és igual a la freqüència de mostreig. 3) Les dades de sèrie SDATA són les dades d'àudio expressades en dos complements. De vegades, per sincronitzar millor els sistemes, cal transmetre un altre senyal MCLK, anomenat rellotge mestre, també anomenat rellotge del sistema (Sys Clock), que és 256 vegades o 384 vegades la freqüència de mostreig.
6. GPIO
GPIO (General Purpose Input Output) o expansor de bus, que utilitza la interfície estàndard industrial I2C, SMBus o SPI per simplificar l'expansió dels ports d'E / S.
Quan el microcontrolador o el conjunt de xips no té prou ports d'E / S, o quan el sistema necessita utilitzar comunicació o control remot en sèrie, els productes GPIO poden proporcionar funcions de control i supervisió addicionals. Cada port GPIO es pot configurar com a entrada o sortida mitjançant el programari. La línia de productes GPIO de Maxim inclou GPIO de 8 a 28 ports, que proporciona una sortida push-pull o open-drain. Disponible en un paquet QFN en miniatura de 3 mm x 3 mm.
(1) Els avantatges de GPIO (expansor de ports):
① Baix consum d'energia: el GPIO té un consum d'energia inferior (aproximadament 1μA, mentre que el corrent de treball de μC és de 100μA).
Interface Interfície esclava IIC integrada: interfície esclava IIC integrada GPIO, pot funcionar a tota velocitat fins i tot en mode d'espera.
Package Paquet petit: els dispositius GPIO proporcionen la mida del paquet més petit: 3 x 3 mm QFN.
④ Baix cost: no heu de pagar per les funcions no utilitzades.
Listing Llista ràpida: no cal escriure codis addicionals, documents ni cap tasca de manteniment.
Control d’il·luminació flexible: múltiples sortides PWM d’alta resolució incorporades.
⑥ Temps de resposta predeterminable: escurçar o determinar el temps de resposta entre esdeveniments externs i interrupcions.
⑦ Millor efecte d'il·luminació: sortida de corrent coincident per garantir una brillantor uniforme de la pantalla.
⑧ Cablejat senzill: només es necessiten 2 busos IIC o 3 busos SPI
7. SDIO
SDIO és una interfície d’expansió de tipus SD. A més de poder connectar-se a una targeta SD, també es pot connectar a dispositius que admeten la interfície SDIO. L’objectiu del sòcol no és només inserir una targeta de memòria. Els PDA i els ordinadors portàtils que admeten la interfície SDIO es poden connectar a receptors GPS, adaptadors Wi-Fi o Bluetooth, mòdems, adaptadors LAN, lectors de codis de barres, ràdios FM, receptors de TV, lectors d’autenticació per radiofreqüència o càmeres digitals i altres dispositius que utilitzen SD interfícies estàndard.
El protocol SDIO s'ha evolucionat i actualitzat a partir del protocol de la targeta SD. Molts llocs conserven el protocol de lectura i escriptura de la targeta SD. Al mateix temps, el protocol SDIO afegeix les ordres CMD52 i CMD53 al protocol de la targeta SD. Per això, una diferència important entre les especificacions de la targeta SDIO i SDIO és l’addició d’estàndards de baixa velocitat. L'aplicació objectiu de les targetes de baixa velocitat comença amb el maquinari més petit per admetre les capacitats d'E / S de baixa velocitat. Les targetes de baixa velocitat admeten aplicacions com ara mòdems, escàners de codis de barres i receptors GPS. Les targetes d'alta velocitat admeten targetes de xarxa, targetes de TV i targetes "combinades", etc. Les targetes combinades fan referència a memòria + SDIO.
Una altra diferència important entre SDIO i SPEC de la targeta SD és l'addició d'estàndards de baixa velocitat. La targeta SDIO només necessita el mode de transmissió SD SPI i 1 bit. L'aplicació objectiu de les targetes de baixa velocitat és donar suport a capacitats d'E / S de baixa velocitat amb una despesa de maquinari mínima. Les targetes de baixa velocitat admeten aplicacions com ara MODEM, escàners de barres i receptors GPS. Per a les targetes combinades, el funcionament a tota velocitat i 4BIT són requisits obligatoris per a la memòria interna i la part SDIO de la targeta. En els dispositius SDIO no combinats, la velocitat màxima només ha d’arribar als 25 milions i la velocitat màxima de la targeta combinada és la mateixa que la velocitat màxima de la targeta SD, que és superior a 25 milions.
8. POT
CAN, el nom complet és "Xarxa d'àrea de controlador", és a dir, Xarxa d'àrea de controlador, que és un dels autobusos de camp més utilitzats al món. Inicialment, CAN es va dissenyar com una comunicació de microcontroladors en l’entorn de l’automòbil, intercanviant informació entre els diversos dispositius de control electrònic de l’ECU del vehicle, formant una xarxa de control electrònic d’automoció. Per exemple, els dispositius de control CAN estan incrustats en sistemes de gestió de motors, controladors de transmissió, equips d’instrumentació i sistemes troncals electrònics.
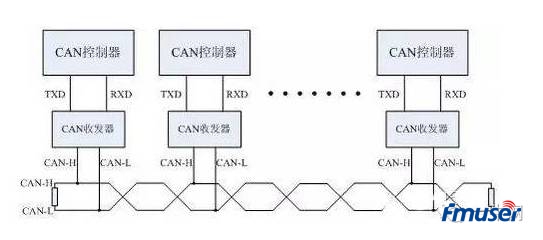
En una única xarxa composta per bus CAN, en teoria, es poden connectar infinitat de nodes. En aplicacions pràctiques, el nombre de nodes està limitat per les característiques elèctriques del maquinari de la xarxa. Per exemple, quan s'utilitza Philips P82C250 com a transceptor CAN, es poden connectar 110 nodes a la mateixa xarxa. CAN pot proporcionar fins a 1 Mb / s de velocitat de transmissió de dades, cosa que facilita el control en temps real. A més, la característica de verificació d'errors del maquinari també millora la capacitat de CAN de resistir les interferències electromagnètiques.
Característiques del bus CAN:
1) Pot funcionar en mode multi-mestre. Qualsevol node de la xarxa pot enviar informació de manera activa a altres nodes de la xarxa en qualsevol moment, independentment del mestre i l’esclau, i el mode de comunicació és flexible.
2) Els nodes de la xarxa es poden dividir en diferents prioritats per satisfer diferents requisits en temps real.
3) S’adopta un mecanisme d’estructura de bus d’arbitratge de bits no destructiu. Quan dos nodes transmeten informació a la xarxa alhora, el node amb prioritat inferior atura activament la transmissió de dades, mentre que el node amb prioritat més alta pot continuar transmetent dades sense que es vegi afectat.
4) Les dades es poden rebre en diversos modes de transmissió: punt a punt, punt a multipunt i emissió global.
5) La distància màxima de comunicació directa pot arribar als 10 km (velocitat inferior a 4Kbps).
6) La velocitat de comunicació pot arribar fins a 1 MB / s (la distància més llarga és de 40 m en aquest moment).



|
|
|
|
A quina distància (llarg) de la coberta del transmissor?
L'abast de transmissió depèn de molts factors. La distància real es basa en la instal·lació de l'antena d'altura, guany d'antena, utilitzant com a mitjà de construcció i altres obstruccions, la sensibilitat del receptor, l'antena del receptor. La instal·lació de l'antena més alta i l'ús en el camp, la distància serà molt més lluny.
Transmissor FM 5W exemple, l'ús a la ciutat i la ciutat natal:
Tinc un client d'ús del transmissor FM amb antena 5W EUA GP a la seva ciutat natal, i ho prova amb un cotxe, és cobrir 10km (6.21mile).
Puc provar el transmissor de FM amb antena GP 5W a la meva ciutat natal, que cobreixen al voltant 2km (1.24mile).
Puc provar el transmissor de FM amb antena 5W metge de capçalera a la ciutat de Guangzhou, que només cobreixen al voltant 300meter (984ft).
A continuació es presenten l'interval aproximat de diferents transmissors de FM de potència. (El rang és de diàmetre)
Transmissor FM 0.1W ~ 5W: 100M ~ 1KM
5W ~ 15W FM Ttransmitter: 1KM ~ 3KM
Transmissor FM 15W ~ 80W: 3KM ~ 10KM
Transmissor FM 80W ~ 500W: 10KM ~ 30KM
Transmissor FM 500W ~ 1000W: 30KM ~ 50KM
Transmissor FM 1KW ~ 2KW: 50KM ~ 100KM
Transmissor FM 2KW ~ 5KW: 100KM ~ 150KM
Transmissor FM 5KW ~ 10KW: 150KM ~ 200KM
Com posar-se en contacte amb nosaltres per al transmissor?
Llámame + O 8618078869184
vam enviar un correu electrònic [protegit per correu electrònic]
1.How fins on vol cobrir de diàmetre?
2.How alta que la torre?
3.Where ets?
I li donarem un assessorament més professional.
Sobre Nosaltres
FMUSER.ORG és una empresa d’integració de sistemes centrada en equips de transmissió i transmissió de vídeo sense fil de radiofreqüència / estudi i processament de dades. Oferim tot, des de l'assessorament i la consultoria a través de la integració de bastidors fins a la instal·lació, la posada en servei i la formació.
Oferim transmissor FM, transmissor de televisió analògica, transmissor de televisió digital, transmissor UHF VHF, antenes, connectors de cable coaxial, STL, processament aeri, productes de difusió per a estudi, monitorització de senyals RF, codificadors RDS, processadors d’àudio i unitats de control de llocs remots, Productes IPTV, codificador / decodificador d’àudio / vídeo, dissenyats per satisfer les necessitats de grans xarxes de difusió internacionals i de petites estacions privades.
La nostra solució compta amb estació de ràdio FM / estació de televisió analògica / estació de televisió digital / equip d’estudi d’àudio i vídeo / enllaç de transmissor d’estudi / sistema de telemetría de transmissor / sistema de televisió d’hotel / transmissió en directe IPTV / transmissió en directe de transmissió / conferència de vídeo / sistema de difusió CATV.
Utilitzem productes de tecnologia avançada per a tots els sistemes, ja que sabem que l’alta fiabilitat i l’alt rendiment són tan importants per al sistema i la solució. Al mateix temps, hem d'assegurar-nos que el nostre sistema de productes té un preu molt raonable.
Tenim clients de radiodifusors públics i comercials, operadors de telecomunicacions i autoritats reguladores, i també oferim solucions i productes a molts centenars d’emissores locals, petites i comunitàries.
FMUSER.ORG porta exportant més de 15 anys i té clients a tot el món. Amb 13 anys d’experiència en aquest camp, comptem amb un equip professional per resoldre tot tipus de problemes del client. Ens dediquem a subministrar els preus extremadament raonables de productes i serveis professionals. Correu electrònic de contacte : [protegit per correu electrònic]
la nostra fàbrica

Tenim modernització de la fàbrica. Que són benvinguts a visitar la nostra fàbrica quan s'arriba a la Xina.

En l'actualitat, ja hi ha clients 1095 a tot el món van visitar la nostra oficina Guangzhou Tianhe. Si vostè ve a la Xina, que són benvinguts a visitar-nos.
a la Fira

Aquesta és la nostra participació en 2012 Global Sources Hong Kong Electronics Fair . Els clients de tot el món finalment tenir l'oportunitat de reunir-se.
On és Fmuser?

Podeu cercar aquests números " 23.127460034623816,113.33224654197693 "a google map, podreu trobar la nostra oficina fmuser.
FMUSER oficina de Guangzhou es troba al districte de Tianhe, que és el centre del Cantó . molt a prop fins al Fira de Canton , Estació de tren de Guangzhou, Xiaobei carretera i Dashatou , Només cal 10 minuts si pren TAXI . Benvinguts amics de tot el món a visitar i negociar.
Contacte: Blue Sky
Cel·lular: + 8618078869184
WhatsApp: + 8618078869184
Wechat: + 8618078869184
Adreça electrònica: [protegit per correu electrònic]
QQ: 727926717
Skype: sky198710021
Adreça: Sala de No.305 Huilan Edifici No.273 Huanpu carretera Guangzhou, Xina Codi postal: 510620
|
|
|
|
Anglès: Acceptem tots els pagaments, com PayPal, targeta de crèdit, Western Union, Alipay, Money Bookers, T / T, LC, DP, DA, OA, Payoneer, si teniu cap pregunta, poseu-vos en contacte amb mi [protegit per correu electrònic] o WhatsApp + 8618078869184
-
PayPal.  www.paypal.com www.paypal.com
Recomanem que utilitzi PayPal per comprar els nostres articles, el PayPal és una forma segura per comprar a Internet.
Cada pàgina de la nostra llista d'elements de fons a la part superior tenen un logotip de PayPal per pagar.
Targeta de crèdit.Si no té PayPal, però vostè ha targeta de crèdit, també pot fer clic al botó groc de PayPal per pagar amb la targeta de crèdit.
-------------------------------------------------- -------------------
Però si vostè no té una targeta de crèdit i no tenir un compte de PayPal o difícil va aconseguir un accout PayPal, pot utilitzar el següent:
Unió Occidental.  www.westernunion.com www.westernunion.com
Pagar per Western Union a mi:
Nom i cognoms: Yingfeng
Cognom / Cognom / Nom de família: Zhang
Nom complet: Yingfeng Zhang
País: Xina
Ciutat: Guangzhou
|
-------------------------------------------------- -------------------
T / T. pagar amb T / T (transferència bancària / transferència telegràfica / transferència bancària)
Primera informació bancària (COMPTE DE L'EMPRESA):
SWIFT BIC: BKCHHKHHXXX
Nom del banc: BANK OF CHINA (HONG KONG) LIMITED, HONG KONG
Adreça bancària: BANC DE LA TORRE DE XINA, 1 GARDEN ROAD, CENTRAL, HONG KONG
CÓDIG BANC: 012
Nom del compte: FMUSER INTERNATIONAL GROUP LIMITED
Núm de compte. : 012-676-2-007855-0
-------------------------------------------------- -------------------
Segona informació bancària (COMPTE DE L'EMPRESA):
Beneficiari: Fmuser International Group Inc.
Número de compte: 44050158090900000337
Banc del beneficiari: sucursal del Guangdong de China Construction Bank
Codi SWIFT: PCBCCNBJGDX
Adreça: carretera NO.553 Tianhe, Guangzhou, Guangdong, districte de Tianhe, Xina
** Nota: quan transferiu diners al nostre compte bancari, NO escriviu res a l'àrea de comentaris, en cas contrari no podrem rebre el pagament a causa de la política governamental sobre comerç internacional.
|
|
|
|
* Aquest document s'enviarà a 1 2-dies de treball quan el pagament és clar.
* Enviarem a la seva adreça de PayPal. Si vostè vol canviar la direcció, si us plau, envieu la vostra direcció correcta i número de telèfon a la vostra adreça [protegit per correu electrònic]
* Si els paquets es troba per sota 2kg, ens enviaran a través de correu aeri, trigarà aproximadament 15-25days a la mà.
Si el paquet és més que 2kg, enviarem a través d'EMS, DHL, UPS, Fedex lliurament ràpid expressa, prendrà al voltant de 7 ~ 15days al seu costat.
Si el paquet de més de 100kg, anem a enviar per DHL o el noli aeri. Es durà a prop 3 ~ 7days al seu costat.
Tots els paquets són la forma xinesa de Guangzhou.
* El paquet s'enviarà com a "regal" i es descomptarà el mínim possible, perquè el comprador no hagi de pagar l'impost.
* Després de la nau, li enviarem un correu electrònic i li donarà el nombre de seguiment.
|
|
|
Per a la garantia.
Poseu-vos en contacte amb nosaltres --- >> Envieu-nos l'article --- >> Rebeu i envieu un altre substitut.
Nom: Liu xiaoxia
Direcció: 305Fang HuiLanGe HuangPuDaDaoXi 273Hao TianHeQu Guangzhou, Xina.
Postal: 510620
Telèfon: + 8618078869184
Si us plau, torni a aquesta adreça i escriure el seu PayPal, nom, adreça problema a la nota: |
|
El nostre altre producte: